Standard Camera Calibrations
The Camera calibration format is based on OpenCVs format and
this paper. The different camera types supported are: PINHOLE, FISHEYE, KANNALA, PRINCIPALPOINTDIST, and FUSEDCYLINDRICAL.
If your calibration model is not supported, you can also provide a custom camera calibration where
you provide the implementation in the form of a WebAssembly module.
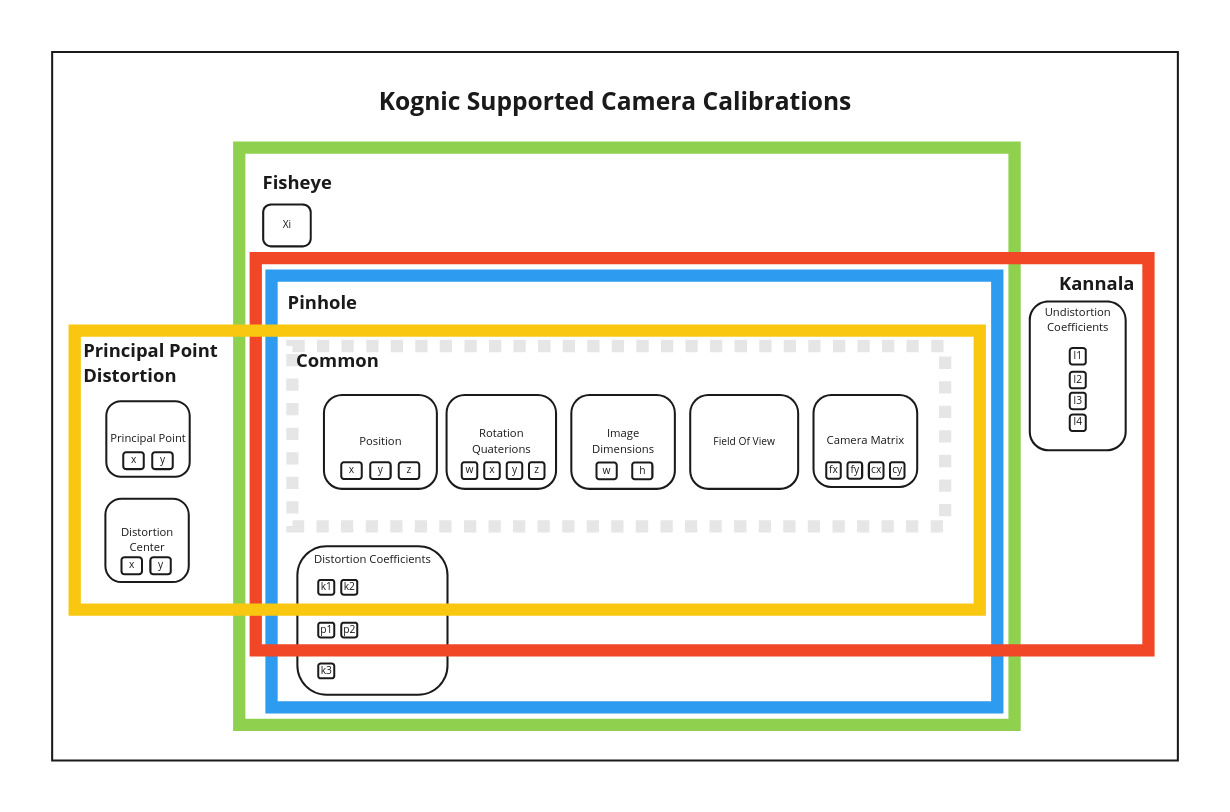
Common
All camera calibrations have the following attributes
| Key | Value | Parameters |
|---|---|---|
rotation_quaternion | A RotationQuaternion object | w, x, y, z |
position | A Position object | x, y, z |
camera_matrix | A CameraMatrix object | fx, fy, cx, cy |
image_width | Integer | NA |
image_height | Integer | NA |
field_of_view | Float | NA |
Pinhole
The PINHOLE camera model expands the common model with:
| Key | Value | Parameters |
|---|---|---|
distortion_coefficients | A DistortionCoefficients object | k1, k2, p1, p2, k3 |
loading...
Fisheye
The Fisheye camera model expands the PINHOLE model with the following
| Key | Value | Parameters |
|---|---|---|
xi | Float | NA |
loading...
Kannala
The KANNALA camera model changes and expands the PINHOLE with the following
| Key | Value | Parameters |
|---|---|---|
distortion_coefficients | A KannalaDistortionCoefficients object. The distortion parameters k3, k4, if available, can be assigned to p1 and p2 respectively. That is p1=k3 and p2=k4. | k1, k2, p1, p2 |
undistortion_coefficients | A UndistortionCoefficients object. | l1, l2, l3, l4 |
loading...
Principal point distortion
The principal point distortion model consists of the common attributes plus
| Key | Value | Parameters |
|---|---|---|
principal_point_distortion_coefficients | A PrincipalPointDistortionCoefficients object | k1, k2 |
lens_projection_coefficients (optional. Default to values for model SF806) | A LensProjectionCoefficients object | c1, c2,c3, c4,c5, c6 |
distortion_center | A DistortionCenter object | x, y |
principal_point | A PrincipalPoint object | x, y |
loading...
Fused cylindrical
The fused cylindrical model consists of the common attributes plus
| Key | Value | Parameters |
|---|---|---|
cut_angles_degree | A CutAngles object. Note these angles should be expressed in degrees. | upper, lower |
vertical_fov_degree (optional. Default 72.5 degrees) | Float. Note this angle should be expressed in degrees. | NA |
horizontal_fov_degree (optional. Default 93 degrees) | Float. Note this angle should be expressed in degrees. | NA |
max_altitude_angle_degree (optional. Default 90 degrees) | Float. Note this angle should be expressed in degrees. | NA |
loading...
Cylindrical
The cylindrical model consists only of the common attributes. There are no extra attributes to set for this model.
loading...
Principal point fisheye
The principal point fisheye model consists of the common attributes plus
| Key | Value | Parameters |
|---|---|---|
principal_point_fisheye_coefficients | A PrincipalPointFisheyeCoefficients object | alpha_l, alpha_r, beta_u, beta_l |
loading...