Key Concepts
If you just want to quickly get started then you don't have to read this page. This is page covers the key concepts that we use.
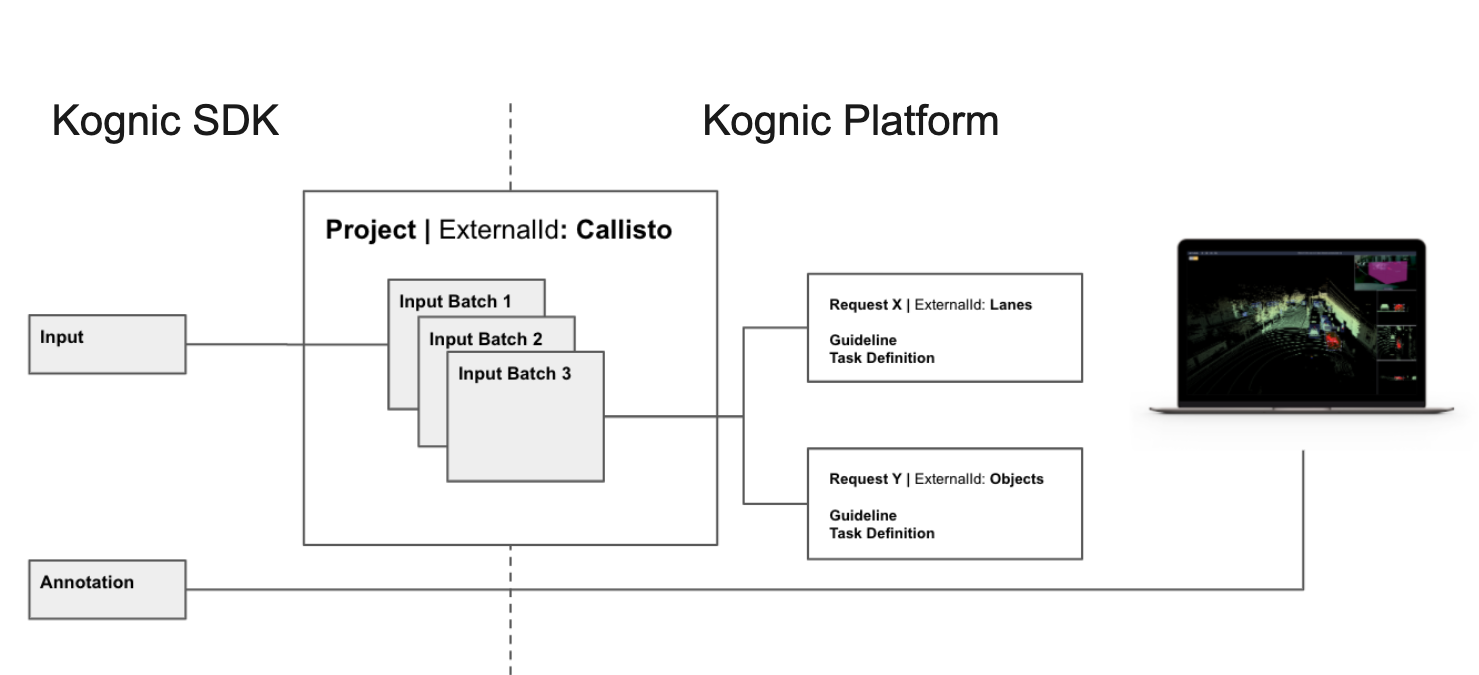
Project
Project is the top-most concept when interfacing with the Kognic Platform. It is possible to have multiple ongoing projects, and they act as a container for other Kognic resources. Project setup is usually performed by the Kognic Professional Services team during the Guideline Agreement Process (GAP) of a new client engagement.
Within the Kognic APIs, projects are identified using an external identifier.
Batch
Input batches allow grouping of input data into smaller batches within a project. By default, every project has at least one input batch.
Ongoing projects can be benefited from having multiple batches in two ways:
- Group input data that are collected during a certain time interval
- Perform guideline or task definition changes without the need for retroactive changes.
Batch Status
| Status | Description |
|---|---|
| pending | Batch has been created but is still not fully configured by Kognic. Either during project setup or requested changes |
| open | Batch is open for new inputs |
| ready | Batch has been published and no longer open for new inputs. |
| in-progress | Kognic has started annotation of inputs within the batch. |
| completed | Annotations has been completed. |
Request
During GAP, projects can have several annotation types as the end goal. For example, a project consisting of images can be assigned for both lane detection and object annotation. Within Kognic, a Request represents a specific annotation goal for a given input. We divide big and complex projects into several independent annotation types. This makes it possible to:
- Reduce the cognitive load on the annotators
- More annotators can work on the same data in parallel
- Simplify user interfaces
All of these contribute to a high level of quality while also reducing the total time needed for producing an annotation.
Guideline
In order to produce annotations, one needs to know what to annotate and how. This type of information is found in Guideline. A guideline defines what specific object to mark (e.g. vehicles and pedestrians), as well as how (e.g. bounding box). A guideline also includes detailed information about how to interpret the data, e.g. what it means by a vehicle is "heavily occluded".
Task Definition
Task Definition describes what should/could be annotated. How many object types? Bounding box, semantic segmentation or lines/splines for each object type? What are the properties for each object type? Task definitions are json files that the Kognic Professional Services team generates from the guideline. The task definition is then used by the Kognic App to construct the appropriate drawing tool. In other words, task definition can be understood as the machine readable quivalent of a guideline.
Scene
Before setting up any annotation task, the raw data needs to be correctly uploaded to the Kognic Platform. The scene specifies how data from different sources are combined together. Resources are images and point clouds, as well as metadata and calibrations (define sensors' properties). We support different types of setup, for example:
- Image(s) from a (multiple) camera(s)
- Image(s) from camera(s) combined with lidar point clouds
Another concept related to scene is frame. A frame is a discrete moment of a scene in time. Scenes can be either single frame or sequence (multiple frames). Sequence should be used when temporal information is important for producing the annotation.
Scene Types
| Type | Description |
|---|---|
| Cameras | A single frame consisting of image(s) from 1-9 cameras |
| LidarsAndCameras | A single frame consisting of 1-20 lidar point clouds and image(s) from 1-9 cameras |
| CamerasSeq | A sequence of frames, each frame consisting of image(s) from 1-9 cameras |
| LidarsAndCamerasSeq | A sequence of frames, each frame consisting of 1-20 lidar point clouds and image(s) from 1-9 cameras |
| AggregatedLidarsAndCamerasSeq | A sequence of frames, each frame consisting of 1-20 lidar point clouds and image(s) from 1-9 cameras. However, point clouds are aggregated over time, producing a unified point cloud. |
Input
Once a scene has been uploaded to the Kognic Platform, one can create annotation tasks as inputs where each input is associated to a request. Differenciate input from scene enables efficient reuse of the uploaded data. For instance, multiple inputs can be created from the same scene enabling different kinds of annotation setups.
Note that one can create an input simultaneously when creating a scene by providing the project/batch that it should be associated to, see examples in Working with Scenes and Inputs.
Annotation
An annotation is produced when inputs are successfully annotated in a request. Annotations are provided by kognic-io API as json objects
in ASAM OpenLABEL format. More information on how to download these annotations along with some examples of
how to work with them is available in the Downloading Annotations chapter.
Apart from kognic-io API, Kognic also provides a library called kognic-openlabel,
which makes it easy to parse and work with the OpenLABEL json objects.